近日,医疗手术机器人初创公司—巧捷力医疗机器人(Agilis Robotics,以下简称“巧捷力”)宣布完成 600 万美元 A 轮融资,由韩国投资伙伴株式会社(Korea Investment Partners Co. Ltd.)和险峰旗云(K2 Venture Partners)联合投资。去年同期,该公司完成了 1000 万港币天使轮融资。
借此机会,生辉联系到巧捷力的联合创始人郭嘉威博士,和他聊了聊巧捷力的最新进展以及他对经自然腔道手术机器人领域的见解。
郭嘉威还是香港大学机械工程系的副教授,博士毕业于伦敦帝国理工学院哈姆林机器人手术中心,专注于机械内镜控制研发工作。他带领的大学团队开发了多个世界首创机器人原型,可于磁力共振影像(MRI) 导航下进行介入手术。他曾在世界两大机器人领域国际顶会上屡获奖项,2018 年获得 ICRA 最佳会议论文奖,以及 2020 年 IROS 福田敏男杰出青年专家奖(IROS Toshio Fukuda Young Professional Award)唯一得主。

▲图|郭嘉威博士(来源:受访者提供)
2021 年, 郭教授联合其他创始人成立巧捷力公司,专注开发经自然腔道柔性手术机器人,尤其是内镜手术用的全柔性机器人,旨在为内镜等手术提供机器化解决方案。
近期,巧捷力在香港中文大学完成首次活体动物测试。其柔性机械臂可以穿过传统的膀胱镜通道,成功切除活体猪膀胱内的整个(人工)肿瘤。
据悉,巧捷力预计明年初开启 B 轮融资,推进其内镜全柔性手术机器人项目进入临床研究阶段。同时也会寻求在大湾区开展合作,进一步与医疗团队优化该机器人手术流程,并提升所需的人体工学等性能。
“经自然腔道手术机器人这一赛道发展潜力巨大,但是市场还比较空白。回看领域内的发展现状,针对消化道和泌尿系统开发柔性机器人的企业更是凤毛麟角,这正是我们的机会所在。”郭嘉威说。
学研转化落地,已在技术上实现多个突破
2007 年,郭嘉威在帝国理工学院接触到内镜手术项目,开始在这一领域内进行创新研究工作。于 2014 年加入香港大学之后,继续探索手术机器人的市场应用前景。
后续,他在手术机器人研究上的创新得到了更多的认可,也受邀在一些相关公司担任咨询顾问工作。
“那时起,我开始考虑是否能把技术转化落地,真正应用到病人身上。这也成为我未来发展事业的新契机,我可以把多年的创新研究、市场分析以及商业化经验整合起来做一些事情。我们计划瞄准一些目前在亚太地区领先的外科技术,但还没有完善机器化方案的手术,尤其是消化道及膀胱等领域,并在此定位上开发一系列精细、灵巧的手术机器人。 ”郭嘉威说。
2021 年,巧捷力正式落地于香港科学园和广州。现阶段,公司重点发展方向是针对具有高技术门槛的内镜手术机器人,包括开发和测试可用于内镜手术的全柔性机器手臂以及一些手术机器人工具。

据郭嘉威透露,全柔性机器手臂已在多个方面实现了突破:第一是全柔性机器手臂的直径非常小,可以穿过常规的消化道镜以及更狭窄的尿道镜,进而应用于消化道和泌尿系统手术;第二是在控制系统上拥有一定优势,可以降低医生操作技术门槛。通过操作手柄来控制双臂的机械运动,并通过算法来优化操控的直观性,大大降低手术的复杂性和难度;第三是全柔性臂可以配合应用到当前还比较空白、缺乏高效工具的手术场景中,巧捷力灵活的机器化手臂正好填充这个空间。
“我们开发的全柔性机器人平台旨在为内镜下的手术提供一个机器化的解决方案,帮助医生更精准、安全、高效地完成手术。”郭嘉威补充道。
开发全球最小“通用型”的内镜柔性机器人,预计明年递交临床批件
内镜手术机器人的研发难点可以归结为 3 个方面:一是常规通用的内镜工作腔道比较狭窄,直径通常为 2.8-3.7 mm,对工具的尺寸要求比较高;二是需要保持一定柔性,适应内镜进入人体通道时的形状改变;三是对整体系统的人体工学要求比较高。
“这三个环节对应着各自的技术要求,是开发内镜手术机器人必须解决的痛点,也是难点所在。我们的解决方案也是从这几个方面入手的,同时还进行了方案优化。”郭嘉威说。
据郭嘉威介绍,公司首先优化了全柔性机器手臂的结构,实现工具尺寸与柔性之间的平衡,这也是最重要的一点;其次是通过软件算法来优化应用,利用人工智能(AI)和扩增实境(AR)来提升整个控制系统的性能;接下来分析人体工学需求,需要更多临床测试来优化医生与病人的互动。
以柔性结构为例,一方面,该公司的思路是通过对机器手臂的优化,使其小于常规的内镜工作通道,这样就无需改变医生使用内镜的选择以及其手术风险的处理。机器手臂工具就可以配合并应用到任何常规内镜手术中,更具有通用性,更快被巿场采用。如果没能完全解决内镜工作通道狭窄这一问题,常见的策略是自主研发内镜以配合机器手臂通过。
另一方面,与腹腔镜机器人中常用的关节传动不同,该公司在柔性体结构方面做了优化创新,即使通过柔性结构,手术工具仍然可以获得足够力量完成手术,且已有量产方案。
基于这些考量,该公司目前已经针对内镜诊疗手术,研发了一整套医疗手术机器人系统。其由柔性手术机械臂、主机以及操控系统三部分组成,柔性臂最小直径小于 2.5 mm,可穿过常规的内镜。今年 6 月底,此系统已经成功完成了在活体猪上进行的膀胱(人工)肿瘤切除手术。

▲图|全柔性内窥镜手术机器臂(来源:受访者提供)
据悉,巧捷力未来还计划将全柔性机器手臂系统拓展应用于人体不同的器官的内镜手术,比如说食道、胃、大肠、结直肠、膀胱等。
郭嘉威坦言,预计明年将会向香港研究伦理委员会(Institutional Review Board,IRB)递交全柔性臂手术机器人的临床试验申请,预计 2 年后进入临床试验阶段。同时计划配合粵港澳大湾区的一系列政策,与内地医生紧密交流、合作,并向 NMPA 递交批件。
“经自然腔道手术机器人领域市场还比较空白”
腔镜手术机器人是当前领域内市场空间最大、商业化最为成功的一类手术机器人。这类机器人已被广泛应用于泌尿外科、妇科、普外科、心胸外科以及头颈外科等手术中。
国际上,Intuitive Surgical Inc.为腔镜手术机器人行业的发展带来重要参考,2021 年 10 月之前在该领域也是一家独大;国内腔镜手术机器人发展也相对成熟,国产腹腔镜手术机器人公司众多,且已有产品获批或者正处于注册申请阶段。有数据指出,预计未来 5 年内,国产腹腔镜手术机器人将会迈入发展大时代。
“经自然腔道手术的巿场技术独立于腹腔镜手术,技术所需层面非常不同,入局公司并不多,市场还比较空白。”郭嘉威说。
经自然腔道手术机器人是指通过人体自然腔道进入手术目标位置,并进行手术操作的机器人,其中自然腔道包括支气管、胃、肠道、泌尿生殖系统等。开源证券的分析报告指出,这类手术机器人适应症丰富,正处于高速发展中。
根据 Frost&Sullivan 的数据分析,2020 年全球经自然腔道手术机器人市场规模约为 7560 万美元,预计到 2026 年市场规模将增长至 17.9 亿美元。整体来看,从 2016 到 2026 的该行业的年复合增长率达到 88.2%,持续保持高速增长。
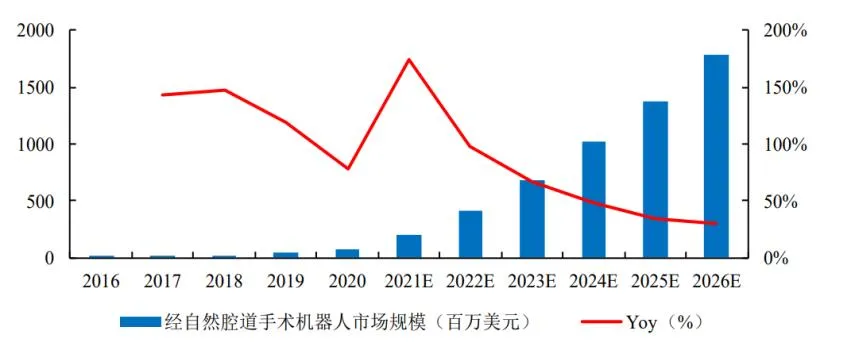
▲图|2016-2026 年全球经自然腔道手术机器人行业市场规模(来源:Frost&Sullivan、开源证券研究所)
尽管市场规模高速增长,但是全球经自然腔道手术机器人仍处于商业化早期阶段。从全球范围来看,目前仅有三款经自然腔道手术机器人产品获批上市,分别为美国 MedRobotics 的 Flex、强生旗下的 Monarch 以及 Intuitive Surgical Inc.旗下的 Ion。
与之相比,国内经自然腔道手术机器人领域起步较晚,大部分在研产品处于临床前研发阶段,且暂无产品获批上市。据统计,国内布局经自然腔道手术机器人的公司还包括微创医疗机器人、精锋医疗、堃博医疗、朗开医疗等。从适应症来看,绝大多数上市和在研的产品以支气管机器人居多,少有针对消化道及泌尿系统的手术机器人。
文章来源:生辉



