近日,巧捷力医疗机器人(下称巧捷力)自主研发的机器人完成了第二轮活体动物测试。本次测试由公司联合创始人陈英权医生完成,在活体实验猪上进行了经尿道膀胱肿瘤整块切除术(En bloc resection of Bladder Tumor,ERBT),手术成功切除了整块人工肿瘤组织,各项测试结果达到预期目标,充分验证巧捷力医疗手术机器人系统的精准性、安全性、有效性。

值得留意的是,此次活体动物测试使用的是巧捷力系统第二代样机。汲取过往测试中的医生建议,研究团队在原有的系统上了进行了多项技术改进更新,以期有效提高完成手术的效率。

巧捷力二代实验样机及手术设置
巧捷力医疗手术机器人的机械臂系统,是针对内窥镜诊疗手术研发的手术机器人系统,该系统由柔性手术机械臂、控制主机以及医生操作椅三部分组成,其柔性机械臂最小直径可少于2.8 mm,并负载夹起肿瘤组织,成功整体切除。
此次测试使用的第二代样机系统,在原有的系统之上进行了多项更新改进。其新的控制定位台设计更加精巧,在原有的体积基础上缩小了50%,使其更加便于在手术室内移动、设置。
其次,更新后的内窥镜支架具备高自由度,可以结合手术需要调整内镜及机械臂的位置。调整器具备感测器,医生可于手术途中以单手便能调节内镜位姿;亦备有自动锁定机制,不会随意移动,使医生操作更顺畅之余、同时确保手术安全进行。
与此同时,巧捷力的第二代样机还对手术工具设计进行改良,令医生在内镜影像中更清晰看见工具,同时也提升了其负载能力,满足更复杂的要求。除此之外,最让人惊喜的,新一代样机大幅提升了操控和机械传动的细节和精准度并降低了控制延迟,给操作者带来更直观的操控体验,彷佛控制自己双手般的流畅。控制主机以外,无论在设计上因应人体工学的设计微调,还是优化训练用模拟器,团队都取得了可观改进。
通过经尿道膀胱肿瘤整块切除术的验证后,接下来巧捷力将为系统进行下消化道内窥镜黏膜下剥离术(endoscopic submucosal dissection,ESD)的动物测试,以实现巧捷力医疗手术机器人系统面向庞大消化道疾病市场的里程碑。
据悉,为打进消化道市场试水温,巧捷力邀请到资深肠胃肝脏科专科医生陈俊嵘试用系统。陈医生具近20年内科专科资格,专注内窥镜检查及内科肠胃手术,更于专栏发表文章,宣扬肠胃健康资讯。陈医生更为香港卫生署大肠癌筛查计划大肠镜检查医生名单之列,为合资格人士提供检查前诊症及大肠镜检查。
陈俊嵘医生为首个试用系统的内科医生,除进行体外组织切除测试外,更为巧捷力系统于消化道病变市场的发展潜力提供意见。此外,内科医生的测试将会为巧捷力于一般内镜检查中心/诊所的普及性提供建议,对系统于各种医疗设施的市场渗透策略有决定性的协助。
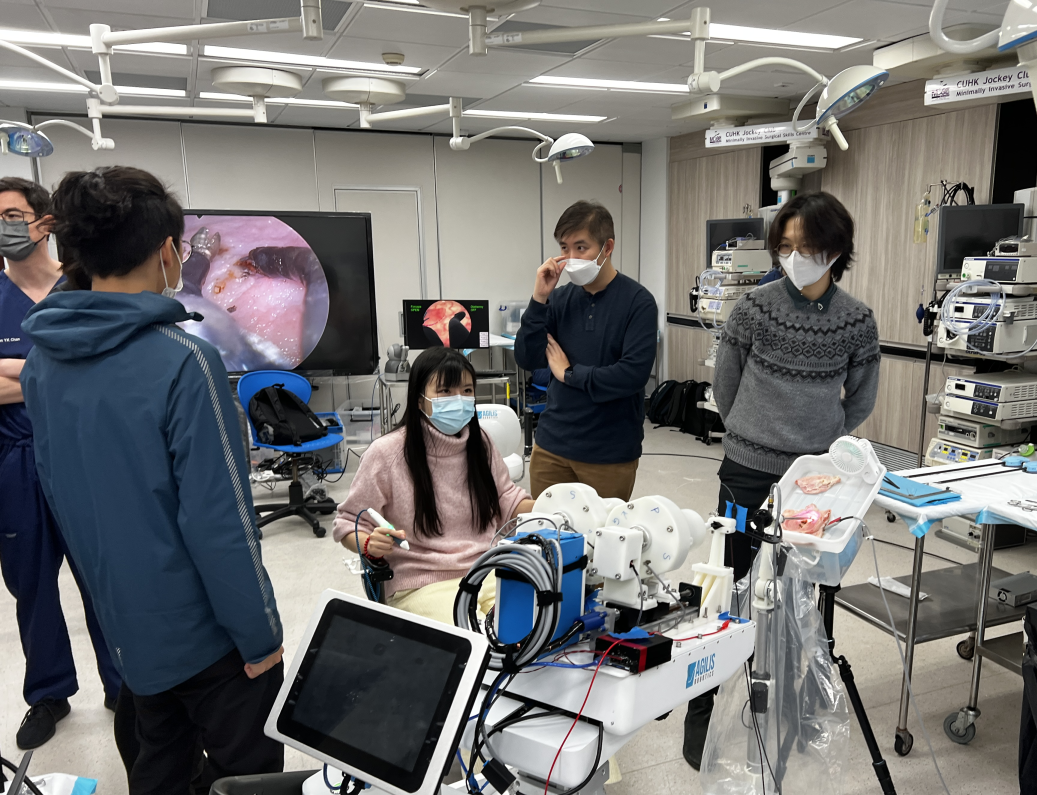
非医疗专业人员正在操控巧捷力手术机器人
文章来源:器械之家
原文链接:最小内镜手术机器人:巧捷力完成新一轮活体动物测试 (qq.com)